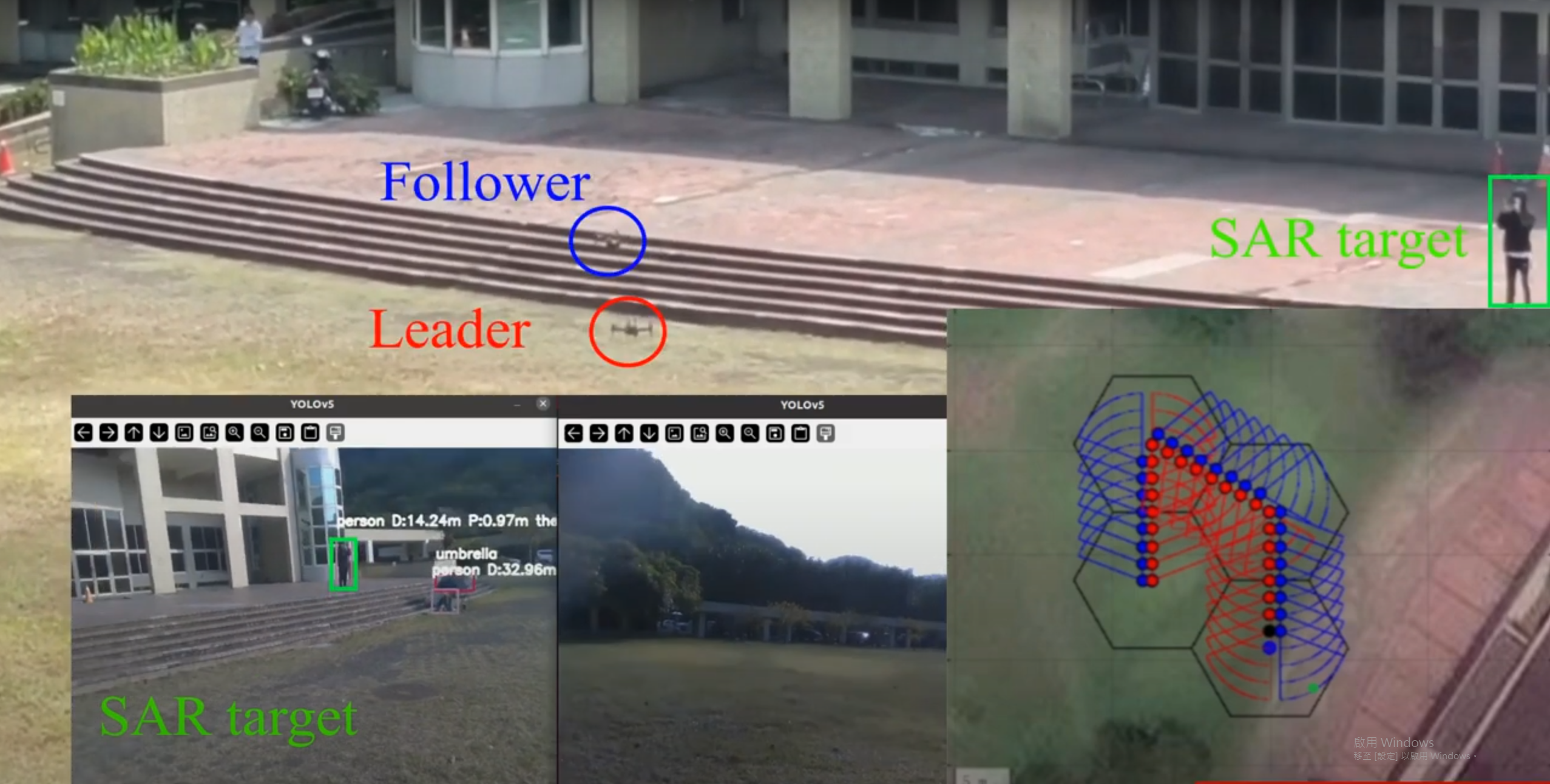
本作品旨在研發一套多無人機的編隊搜救系統。結合路徑規劃、影像辨識、無人機編隊控制。系統的主要創新點在於靈活的編隊控制和協同操作,使無人機可根據任務需求動態調整隊形,並通過距離估計與座標轉換計算出精確經緯度,立刻回傳給搜救人員迅速展開行動。
多無人機編隊與影像辨識系統
Multi-UAV Formation-Based Search and Rescue System for Victim Localization Using Image Recognition